無人機傾斜三維攝影測量土方計算,測繪人必看!
瀏覽量:0發布時間:2024-06-27 17:22:55
無人機傾斜攝影技術的不斷發展為土方測量中存在的受地形限制,費時耗力等問題提供了解決途徑。本文詳細闡述了結合PhotoScan軟件進行無人機傾斜攝影土方計算的方法,介紹了點云分類方法與非地面點高程值修正方法。通過對地面控制點、點云分類方法和非地面點高程等因素進行分析,提出了地面控制點布設優化三原則,并利用RTK土方計算結果對無人機傾斜攝影測量土方計算結果進行精度分析。結果表明:利用無人機傾斜攝影技術進行土方計算,不僅能夠簡化內外業工作流程,降低生產成本,同時,通過對地面控制點布設、點云分類方法和非地面點高程改進方法等影響因素進行優化,還能夠在一定程度上提高土方計算的精度。
土方工程在整個建筑施工項目中占據著重要地位,其計算準確性直接影響著整個工程施工進度及造價預算,如何高效準確進行土方計算成為當今研究的熱門話題。無人機傾斜攝影測量技術能夠快速獲取數據,通過建立數字高程模型實現土方量快速計算。當前,圍繞土方量計算及無人機在土方工程中的應用等問題,眾多研究人員已取得一些階段性成果。總體上現有研究較好地促進了無人機傾斜測繪技術在土方工程中的發展,在土方計算方法和自動化建模等方面研究較多,但現有研究對精度影響因素分析較少,如控制點布設、點云分類和非地面點高程改正等影響因素。隨著無人機相機分辨率與續航能力的不斷提升,無人機傾斜測繪技術越來越多應用于土方工程項目中,如何快速精確的進行高精度土方計算仍然值得探討和研究。
本文將結合PhotoScan軟件對土方計算流程進行詳細闡述,對比分析控制點布設、點云分類方法和非地面點高程改正方法等因素對土方計算精度的影響,并結合RTK技術計算得到的土方量對基于無人機傾斜攝影計算的土方量進行精度檢核,旨在通過對精度影響因素進行分析以優化土方計算流程、提升計算精度,從而縮短土方計算時間、降低生產成本。
根據現場踏勘進行航高設計及航線設計,利用多旋翼無人機搭載多鏡頭相機從多視角同步采集地表數據,通過搭載POS/IMU平臺獲取飛行過程中的實時位置信息,并利用RTK設備進行地面點數據采集。
結合PhotoScan軟件對測區邊界外多余影像數據進行剔除,利用POS數據與地面控制點數據進行影像匹配和聯合平差,生成稀疏點云數據。通過對稀疏點云進行點云加密得到密集點云數據,利用點云分類方式細化出地面點和非地面點,并基于高程改進方法進行非地面點高程改正,聯合改正后的地面點和非地面點構建數字高程模型(DEM),最后通過導入測區和設計標高進行土方計算。
本文利用DjiMatrice600多旋翼無人機進行數據采集,結合PhotoScan軟件對數據進行處理以構建出數字高程模型,并進行土方計算。其具體流程如下圖所示。
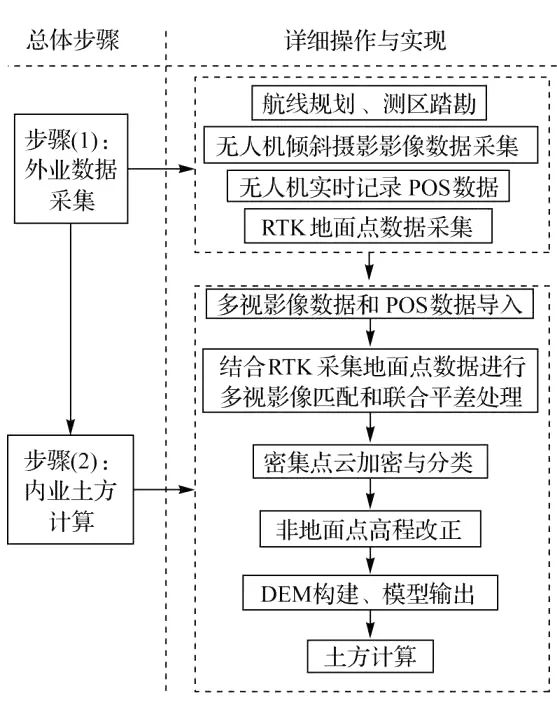
工作流程
本文在介紹無人機傾斜攝影測量土方計算流程的同時,著重對密集點云分類方法和非地面點數據高程糾正方法進行研究,并對其計算結果進行分析對比,以提高土方計算精度。
密集點云分類。生成的密集點云包含大量樹木、建筑物等非地面點數據,若直接利用數據進行計算,會使得該部分計算高程明顯大于實際高程,從而導致計算結果出現較大的誤差,因此進行點云數據的分類,準確的區分出各類地物顯得至關重要。測區各類型地物點數據往往不是均勻分布,如何準確識別出各個地物類型的邊界范圍線,快速準確地構建建筑物、高大植被、湖泊等分類區,是土方計算數據分類的難點。
非地面點高程改正。當測區覆蓋大量的植被、建筑物等非地面點數據時,會導致所獲取的數據無法真實反映地面起伏變化。若直接舍棄植被、建筑物等非地面點坐標進行內插求算土方,內插部分會產生較大的高程誤差,且無法真實表現地面高程起伏,而土方計算的目的是獲取地表真實的標高和設計標高之間的真實差值,因此需要筆者對非地面點高程值進行修正,使得其能夠最佳的逼近真實高程值坐標。由于測區覆蓋的植被樹木和建筑物等非地面點數據往往高低不一,如何利用抽樣測量的方式得到植被樹木最佳逼近值,如何對測區覆蓋的建筑物利用臨近區域高程進行差值計算獲得其地面點高程是進行非地面點高程糾正的難點。
土方計算精度分析。土方計算的精度會對整個工程的施工控制、成本管理等產生直接影響,對土方精度進行分析優化使土方計算結果能反映真實地貌特征顯得尤為重要。不同測區其地形地物特征都千變萬化,如何通過對其影響因素進行分析得出各個要素對精度的影響情況,提出各個影響因素的最優化方案以提升土方計算精度,這是土方計算精度分析的主要目的和難點。
某測區面積約為50km2,呈狹長形,南北長約500m東西寬約100m。如下圖所示,測區地形復雜,植被高大茂盛,建筑物錯落分布,坡度起伏較大,測區部分高程差接近35m。

測區實景
本文工程使用DjiMatrice600電動多旋翼無人機,通過搭載五鏡頭高分辨傾斜相機進行同步影像數據采集,并搭載高精度IMU/POS裝置對無人機位置信息進行實時記錄,并利用RTK設備進行地面點數據采集。航攝所用無人機平臺與搭載傳感器參數見表1。
本文項目通過現場踏勘,并結合《低空數字攝航空攝影測量外業規范》要求,確定飛行規劃如下:飛行區域共規劃航線10條,地面采樣間距3cm,航線內線性漸變飛行高度設置為150m,測區設置旁相重疊度70%,航向重疊度80%,獲取航片數據800余張。同時,本文項目采用均勻布點的方式在測區范圍內布設地面控制點22個,保證每個控制點能在多張像片上找到,并按照10m的采樣間距進行RTK野外點位數據采集,對部分高程起伏較大的區域進行適當加密采集。
本文項目結合PhotoScan軟件進行影像數據處理與土方計算,其主要流程如下:
多視影像匹配與聯合平差。在PhotoScan軟件中,導入無人機航攝所獲取的影像數據、POS坐標數據,結合控制點實景照片完成刺點,通過導入控制點數據進行聯合平差處理生成稀疏點云。
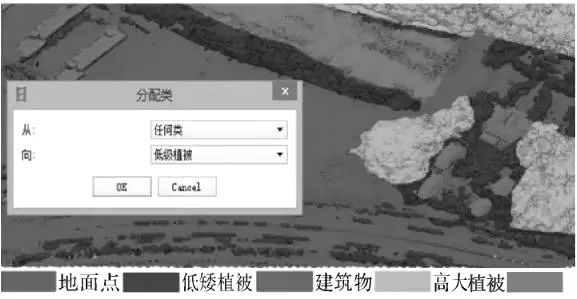
密集點云分類。對稀疏點云數據進行點云加密生成密集點云數據,這些數據往往包含一定的噪聲,同時各類地物數據混雜無法進行高程值修正,因此需要進行點云數據分類。點云分類分兩步:自動分類和目視修正。在進行自動分類前需要進行最大角度、最大距離和單元格大小等參數設置,其中最大距離是指有關點與地形模型之間距離,該參數確定了最大地面高程變化的情況;最大角度是指地形模型與將該新點與地面點構成連線之間的夾角,該參數確定了單元大小內的地面最大坡度情況;單元格大小是指要劃分為點云的小區大小,該參數根據不包含任何地面點的最大區域大小來劃分。由于測區分布較多的低矮植被且地形起伏較大,因此將密云被分成大小50m的單元格,將與地形模型相距距離設置為1m,地形模型與將該新點與地面點連線之間的夾角設置為15°。利用自動分類功能判斷3個參數值與檢測點的差值,當小于預定的3個參數值時,該點將被分類為地面點數據,自動分類結果如下圖所示。

點云自動分類
同時,通過實地踏勘和實景照片對比可以發現,自動分類的點云數據存在一定的錯誤分類,如將植被識別成地面點、將地面點識別成樓面點等,這些數據的錯誤識別會對后期的土方計算造成影響,在計算前需要進行一定的糾正。本次試驗采用目視糾正分類方法對自動分類結果進行糾正,對于錯分類地物點進行重新分類。同時將分類圖與實景照片進行疊加,實現對非地面點云細化分類,創建高大植被、低矮植被、建筑物、湖泊等新數據類型。目視糾正后分類結果如下圖所示。
分類點高程修正。由于測區覆蓋大量的樹木,同時交錯分布著大量建筑物,而土方計算是為了反映地表的真實情況,樹木和建筑物會對計算結果產生較大的影響。本次試驗通過實地抽樣量測方式求取測區范圍內植被以及建筑物的平均高度,主要修正過程如下:
建筑物:研究區建筑物較多且高度不一,因此需要進行單個平差處理。本次項目利用全站儀進行建筑物高度量測,并利用RTK采集部分建筑物臨近區域點位坐標,從而進行聯合平差處理,求取出建筑物地面高度改正值,實現對建筑物高程改正。
植被:試驗區植被根據樹木高度差異主要分為低矮植被和高大樹木兩類。利用抽樣調查的方式,對測區部分植被數據進行實地量測,通過求取平均值的方式確定試驗區低矮植被平均高度約為2m,高大樹木平均高度約為6m,因此,統一對分類后的植被高程值對應進行平差處理,從而得到近似的植被地面點坐標。關注《測繪玩家》微信公眾號,學習更多技術干貨!
數字高程模型(DEM)生成與土方計算。利用高程修正后的點云數據生成DEM數據,如下圖所示。關注《測繪玩家》微信公眾號,學習更多技術干貨!
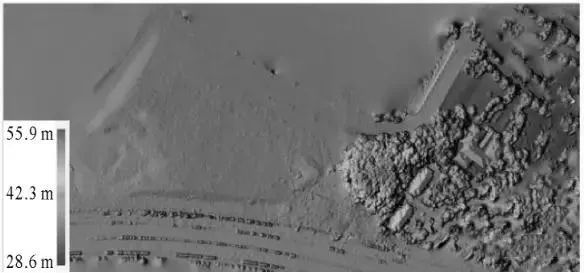
數字高程模型
確定出測區邊界線,利用PhotoScan軟件體積量測功能,選擇自定義標高的模式,通過輸入設計標高40m進行體積量測,計算結果如下圖所示。通過計算可知,該測區挖方量為48706.3m3,填方量為17941.51m3,該測區凈填方量為30764.8m3。
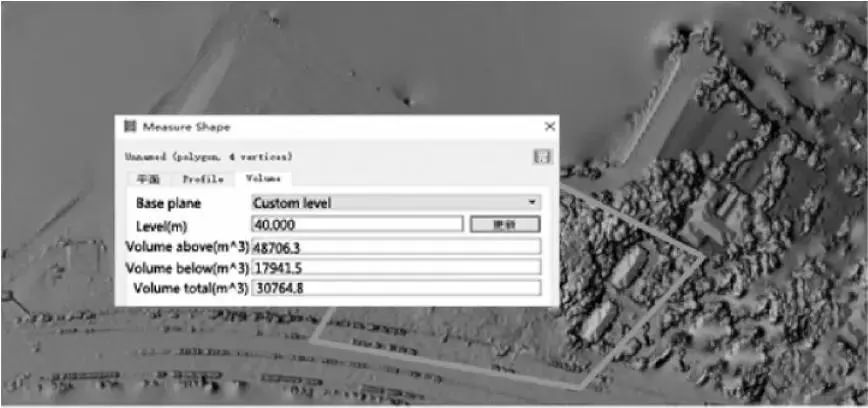
土方計算
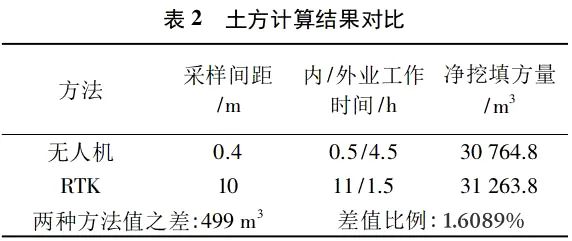
為驗證土方計算的準確性和可靠性,本文項目通過RTK均勻采點的方式進行地面數據點采集,并對測區部分起伏較大區域進行數據點加密采集,結合南方CASS9.0中的格網法土方計算功能,對設計場地的土方填挖方量進行復核計算,其計算結果見下表。
利用無人機傾斜攝影測量方式進行土方計算能夠在一定程度上節省內外業工作時間,提高工作效率。
通過對RTK實測數據計算結果和無人機傾斜攝影測量計算結果對比,挖填方量差值比為1.6089%,能夠滿足土方計算的規范要求。
本文從以下3種情況進行分析,研究點云分類和高程修正對DEM構建及土方計算精度的影響:
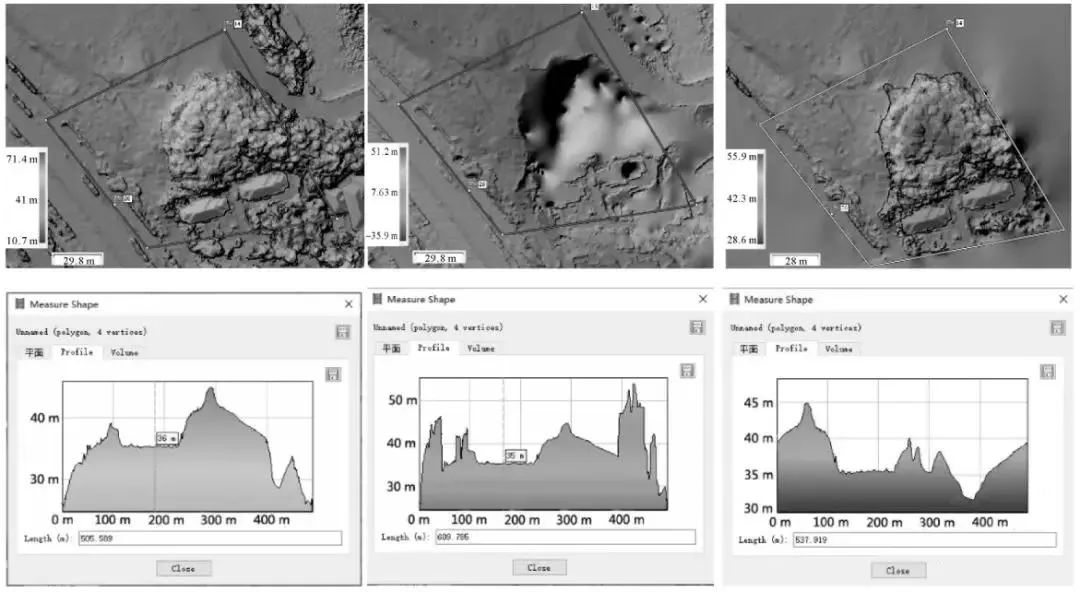
3 種方法生成的DEM與橫截面高程
通過對這3種情況分別進行試驗,生成的DEM與反映測區高程起伏情況的橫截面情況如下圖所示。同時,設定相同的設計標高和測區范圍,結合PhotoScan軟件對3種方法生成的DEM數據進行土方計算,其計算結果見表3。

通過對DEM數據、橫截面高程分布及土方計算結果進行分析對比,可以得出以下結論:
由于測區覆蓋著大量的植被和建筑物等非地面點數據,這些數據高程值明顯大于實際地表高程值。當利用這些點未分類點參與土方計算時,會導致其挖方量明顯大于實際的挖方量,產生較大的計算誤差。
利用地面點內插非地面點時,由于測區起伏較大且較為復雜,內插點難以真實地反映地面起伏情況,導致所插值點高程明顯低于實際高程值。利用這些差值點計算土方時,會使得挖方值明顯小于實際值,而填方值明顯大于實際值。
利用修正后的點云數據參與土方計算時,由于高程改正后的非地面點數據能夠最大限度地反映真實地面起伏情況,在一定程度上削減了植被和建筑物等地物對計算結果的影響,使得挖填方計算值與實際值較為接近。
本文從控制點數量及布設情況進行分析,研究控制點對土方計算精度的影響。通過反復對控制點個數和布設進行調整,并與外業采集RTK數據點進行精度對比分析,可以得出以下布設優化原則
采用POS數據和控制點聯合平差可以在一定程度上提高坐標點位精度,提升土方計算精度。
根據多次試驗得出,地面控制點應盡量分布均勻在四周,每平方千米布設6~8個像控點便可達到較高的控制精度,但當測區小于1km2時,應盡量在四周均勻布設不少于4個控制點。
隨著布設地面控制點數量的增加,土方計算精度逐漸趨向于穩定分布,因此,布設過多的地面控制點對于土方精度提升并無顯著作用。關注《測繪玩家》微信公眾號,學習更多技術干貨!
土方工程量計算精度是土方工程的重要環節之一,對整個項目施工進度控制和成本控制有重要的影響。本文研究了基于無人機傾斜攝影測量土方計算方法,并結合實際工程案例,從不同方面探討了土方計算的精度問題:如何優化地面控制點數量和布設方式以提高計算精度;如何優化點云分類方式和高程值改正方式以得到最貼合地面高程點數據從而真實反映地面高程信息。在地面控制點選擇方面,通過反復試驗得出控制點數量選擇與布設方式參考3大原則以提升土方計算精度;在點云分類和高程值修正方面,通過對測區非地面點數據細化分類,利用抽樣量測方式進行平差處理,從而得到最優化分類和改正方案。結果表明,利用無人機傾斜攝影測量進行土方計算,不僅不受場地障礙的影響,外業時間短、工作效率高、快捷方便,而且能夠簡化內業操作流程,實現一體化土方計算。同時,通過對地面控制點的合理布設、點云分類和高程值修正優化等處理,能夠在一定程度上優化無人機傾斜攝影測量土方計算流程,提升土方計算精度,較好地解決復雜地區植被和建筑物等地物遮擋對土方計算精度的影響。
關注《測繪玩家》微信公眾號,學習更多技術干貨!
來源:網絡(侵刪)